科技生活| 蜈蚣爬行方式取靈感 多腿機械人克服崎嶇
科技再一次從大自然中獲得了靈感。在研究了蜈蚣如何穿越崎嶇的地形後,研究人員創造了一個多腿機械人,模仿它們彎曲的側向運動,提供更大的穩定性和可操作性。
蜈蚣和千足蟲是有肢動物,這種動物的身體由許多類似的部分組成,幾乎所有的部分都有連接的腿。蜈蚣可以在不同的地形中有效地移動,因為它們靈活的身體和肢體的數量使它們能夠適應環境的形狀。
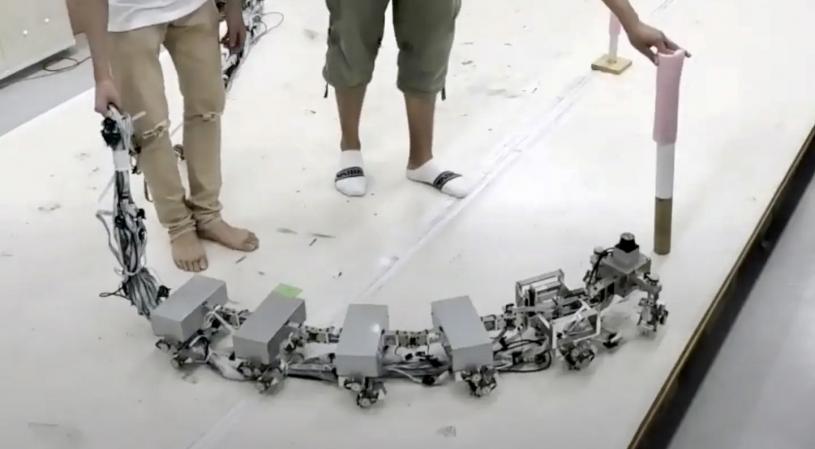
研究生物仿生多腿機械人的人員,經常遇到挫折,例如當一條腿因反覆受力而出現故障時,會限制了整個機械人的移動能力。而且控制大量的腿需要大量的運算能力。現在,來自日本大阪大學的研究人員開發了他們自己的機械人myriapod,有六段,每段包含兩條腿,並有靈活的關節。
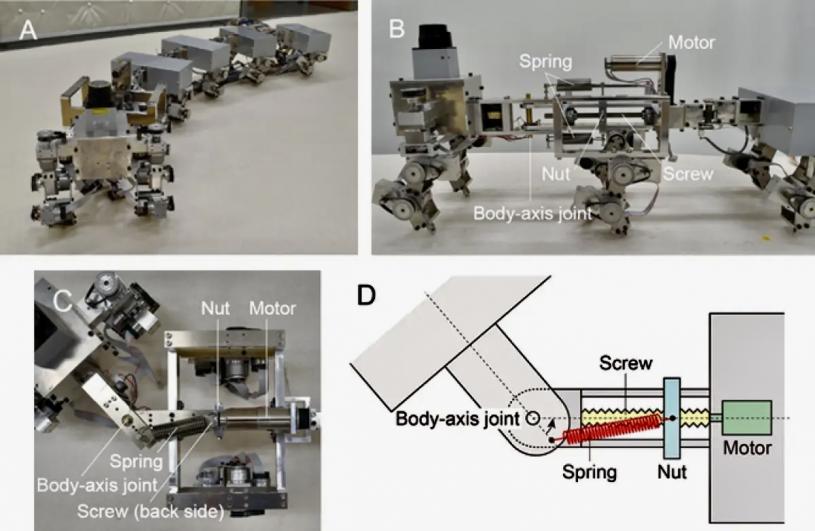
該機械人長度為53吋(135厘米),重量為20磅(9.1公斤)。它的六個獨立的部分有一對連接的腿,由兩個鏈接組成,通過靈活的關節連接,允許偏航或在不同的方向移動。
研究人員發現,增加關節的靈活性會導致直線行走變得不穩定。研究人員沒有糾正這種不穩定性,而是利用它,讓機械人以一種彎曲的模式行走,要麼向左,要麼向右,就像蜈蚣一樣。
這項研究的主要人員Shinya Aoi說:「我們的靈感來自於某些極其敏捷的昆蟲的能力,這種能力使它們能夠控制自身運動中的動態不穩定性,從而引起快速的運動變化。」
研究人員發現,不直接操縱機械人,而是控制其身體軸的靈活性,大大降低了運算的複雜性和操作機械人所需的能量要求。

在測試了機械人的運動後,他們發現它可以通過一條彎曲的路徑到達目標。研究人員認為他們的機械人myriapod的應用範圍很廣泛。
該研究的共同作者之一Mau Adachi說:「我們可以預見在各種各樣的情況下的應用,如搜索和救援,在危險環境中工作或探索其他星球。」
在未來,研究人員計劃在更具挑戰性的環境中測試他們的設計,例如在凹凸不平的地形上。
圖片:Osaka University
T09
>>>星島網WhatsApp爆料熱線(416)6775679,爆料一經錄用,薄酬致意。
>>>立即瀏覽【生活百答】欄目:新移民抵埗攻略,老華僑也未必知道的事,移民、工作、居住、食玩買、交通、報稅、銀行、福利、生育、教育。









