科技生活|内嵌镜头传感器识别 机械手一抓即知东西
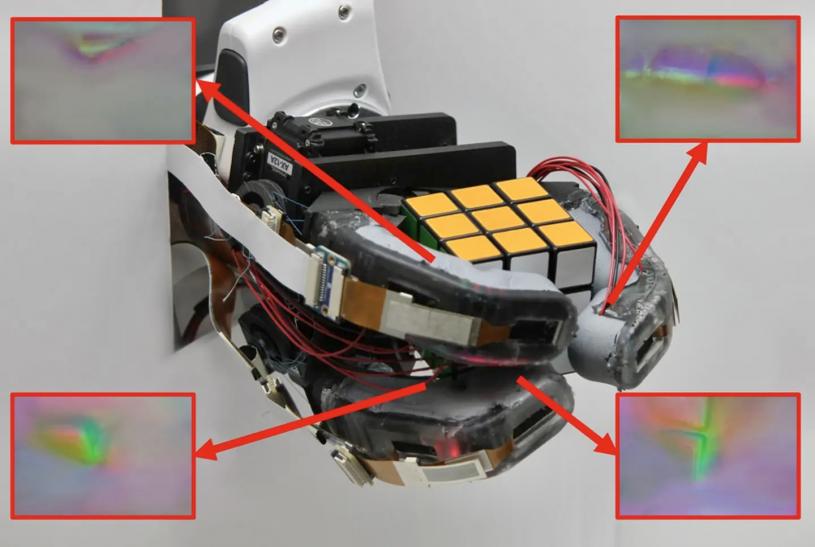
从人类手指中获得灵感,麻省理工学院的研究人员已经开发出一种具有高韧性分辨率传感的机器人手,只需抓一下就能准确识别物体。这个实验装置被称为GelSight EndoFlex。
许多机器人手将其强大的传感器全部放在指尖上,因此物体必须与这些指尖完全接触才能被识别,这可能需要多次抓取。其他设计使用分布在整个手指长度上的低分辨率传感器,但这些传感器不能捕捉到那么多的细节,所以通常也需要多次抓取。
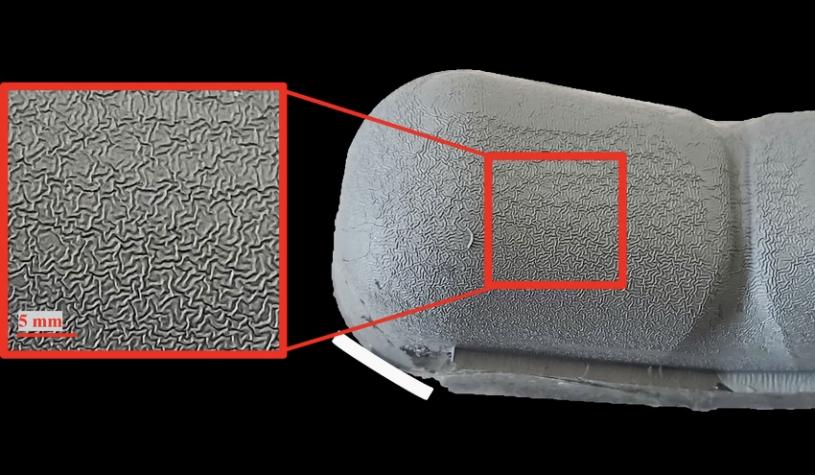
现在,麻省理工学院的团队已经创造了一个机器人手,其刚性的3D打印内骨骼被包裹在一个柔软的外壳中,在其透明的硅胶皮肤下嵌入了多个高分辨率的传感器。
每根手指的内骨骼包含一对GelSight触摸传感器,嵌入透明皮肤下的顶部和中间部分。传感器使用一个镜头和彩色LED灯,收集关于物体形状的视觉信息,沿着手指的整个长度提供连续的检测。每根手指都能同时捕捉到物体许多部分的丰富数据。
一个特殊的算法进行逆向计算,以映射被抓物体表面的轮廓,并将其变成3D图像。这些图像然后被发送到一个机器学习算法,该算法使用它们作为输入来识别物体。由于触觉感应覆蓋了所有的手指,这只手可以从一次抓握中收集丰富的触觉数据。
利用这种设计,研究人员建立了一个三指机器人手,使用两根手指以Y型排列,第三根手指作为对立的拇指。这只手在抓住一个物体时捕捉到六张图像(每根手指两张),并将这些图像发送给机器学习算法,该算法将这些图像作为输入,以大约85%的准确率识别该物体。随着技术的进一步发展,这个数字应该有所提高。
坚硬的骨架使手指足够强壮,可以拿起重物如电钻,而柔软的皮肤使它们能够安全地抓住柔韧的物品而不被压碎。
在未来的工作中,研究人员还希望改进硬件,以减少硅胶的长期磨损。他们还计划在拇指上增加更多的驱动力,以便它能执行更广泛的任务。
图片:MIT
T09
>>>星岛网WhatsApp爆料热线(416)6775679,爆料一经录用,薄酬致意。
>>>立即浏览【生活百答】栏目:新移民抵埗攻略,老华侨也未必知道的事,移民、工作、居住、食玩买、交通、报税、银行、福利、生育、教育。









