MIT迷你机器人新模式 行动和学习“全自动波”

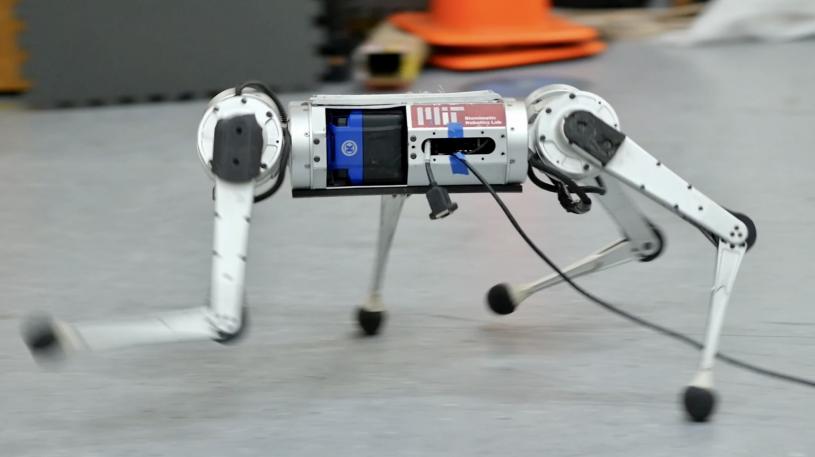
[星岛综合报道]麻省理工学院的迷你猎豹机器人(mini cheetah robot)打破了自己的个人最佳速度,达到了8.72英里/小时(14.04公里/小时),这要归功于一个新的无模型强化学习系统,该系统允许机器人自己找出最佳的运行方式,并允许它适应不同的地形,而不依赖于人类的分析。
迷你猎豹并不是目前最快的四足机器人。2012年,其较大的猎豹兄弟姐妹的最高速度达到了28.3英里/小时(45.5公里/小时),但麻省理工学院Improbable人工智能实验室和美国国家科学基金会人工智能与基础互动研究所(IAIFI)正在开发的迷你猎豹更加灵活,甚至不需要迈出一步就能学习。
在一个新的视频中,可以看到这个四足机器人撞上了障碍物并复原,在障碍物中飞奔,在一条腿失去作用的情况下奔跑,并适应湿滑、冰冷的地形,以及松散的砾石山。这种适应性要归功于一个简单的神经网络,它可以对可能使其处于高压力的新情况作出评估。
通常情况下,机器人如何移动是由一个系统控制的,该系统使用基于对机械肢体如何移动的分析的数据来创建模型作为指导。然而,这些模型往往是低效和不足够的,因为不可能预测到每一个突发情况。
当一个机器人以最高速度运行时,它是在其硬件的极限下运行的,这使得它很难建模,所以机器人很难迅速适应环境的突然变化。为了克服这个问题,麻省理工学院的团队选择了通过经验学习的机器人,而不是分析设计的机器人,如波士顿动力公司的Spot,它依赖于人类分析运动的物理学,并手动配置机器人的硬件和软件。
在这种情况下,机器人在没有人类参与的情况下通过试验和错误进行学习。如果机器人对不同的地形有足够的经验,它可以自动改善其行为,而且这种经验甚至不需要在现实世界中。据该团队称,通过模拟,迷你猎豹在静止不动的情况下可以在三个小时内积累100天的经验。
“我们开发了一种方法,通过这种方法,机器人的行为从模拟的经验中得到改善,我们的方法关键还能在现实世界中成功部署这些学到的行为,”麻省理工学院博士生Gabriel Margolis和IAIFI博士后Ge Yang说。“为什么机器械人的运行技能在现实世界中运行良好,其背后的直觉是:在它在这个模拟器中看到的所有环境中,有些环境将教会机器人在现实世界中有用的技能。当在现实世界中操作时,我们的控制器会实时识别并执行相关技能。”
研究人员声称,有了这样一个系统,就有可能扩大技术规模,而传统的范式不能轻易做到这一点。
“建立一个具有许多不同技能的机器人的一个更实际的方法是告诉机械工程人做什么,让它自己想办法。”

图片:MIT
T09
>>>立即浏览【移民百答】栏目:新移民抵埗攻略,老华侨也未必知道的事,移民、工作、居住、食玩买、交通、报税、银行、福利、生育、教育。
>>>即读【新移民专栏】:新移民第一身经验,与你分享当下年轻移民生活日常大小事,即读“新移民专栏”。

iPhone:https://apple.co/2IBi812
Android:https://bit.ly/2Pe8anu
>>>订阅【加拿大星岛网电邮快讯】,每天可收到最快新闻资讯电邮:
https://www.singtao.ca/subscribe/singtao.php
>>>立即关注加拿大星岛新闻网TG Channel,让加国新闻无遗漏全天候向你推送:
https://t.me/singtaoca
>>>订阅CCUE YouTube 频道,查看更多吃喝玩乐、生活资讯影片。









